Overview and Motivation
This is an ongoing research project at Dynamical Systems and Control Lab at JHU. The research focuses on developing adaptive identification of both plant and actuator parameters for an underactuated, nonlinear 5 DOF Iver3 AUV model. The applications are in model-based fault detection and isolation, navigation and control.
- Languages: MATLAB
- Skills : Adaptive Identification, Nonlinear Dynamics
My contribution
I worked in collaboration with Annie Mao, a PhD student in the lab.
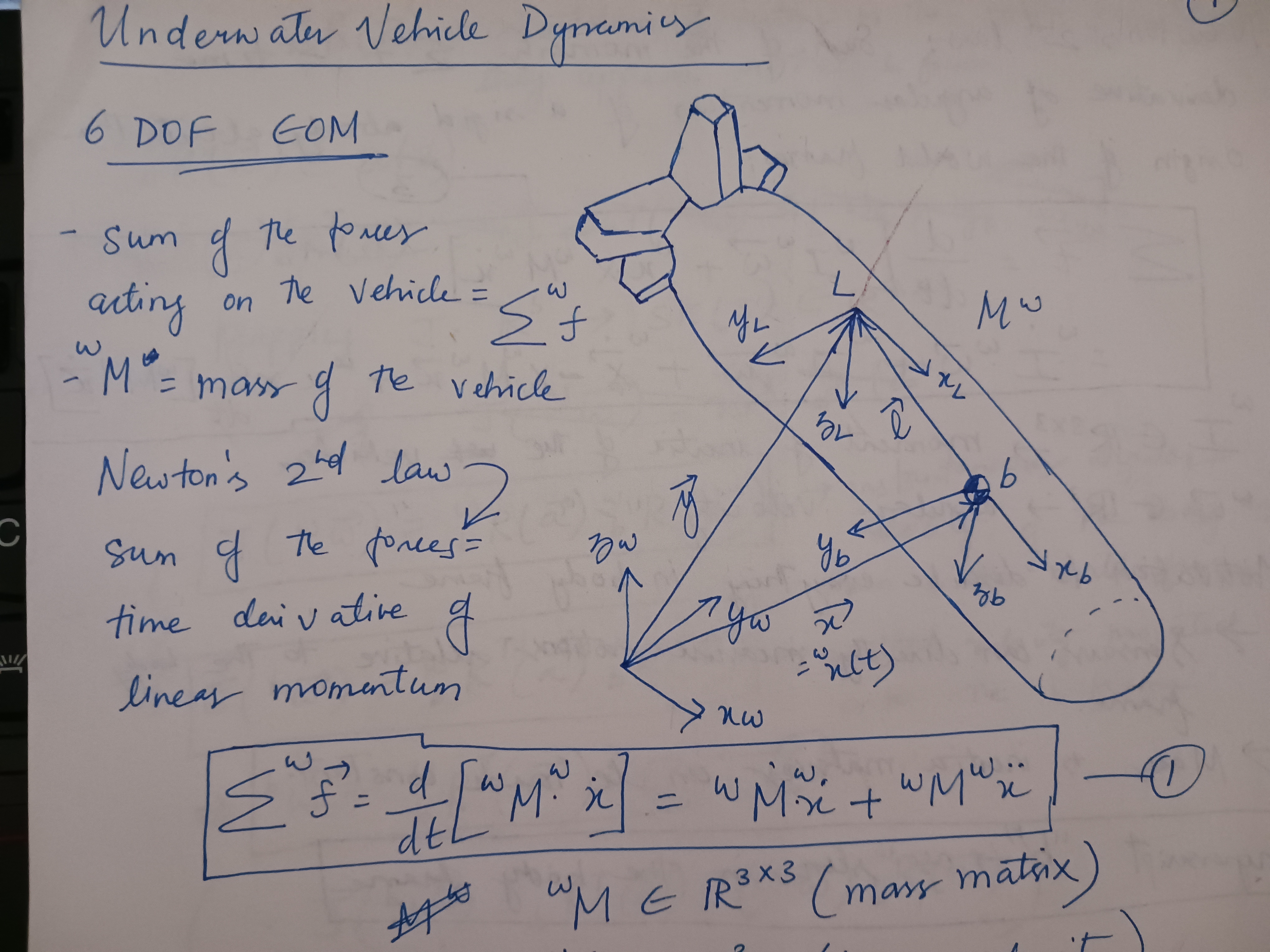
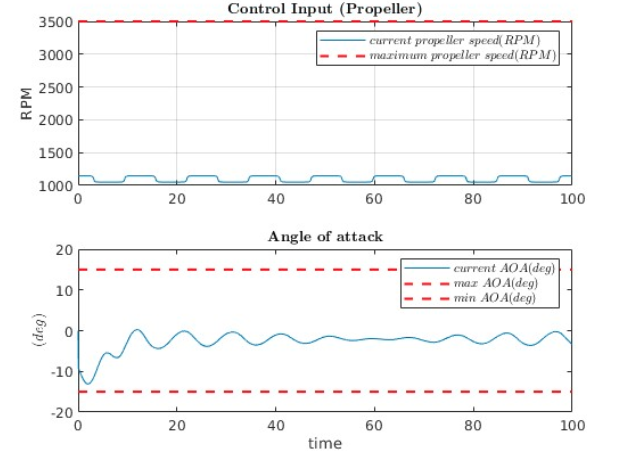
- The complex dynamics of the AUV that involves drag and lift coefficients, the effects of angle of attack on these coefficients, the relationship between fin angles and pitch angle, buoyancy parameters and parameters that contribute to hydrodynamic drag were studied and analyzed. These dynamics were later used to design control inputs that result in physically possible values of various states such as thurster input, pitch angle, angle of attack, linear and angular velocities.
- Another aspect of this project that I am working on is to tune adaptive controller gains to achieve parameter convergence and check for persistent excitation conditions for the control inputs. This, for an underactuated system is an open research question in adaptive systems field. The system on a total has 32 dynamic parameters which include mass, inertia, drag, buoyancy and actuator parameters.
Results so far
| Control inputs following boundary conditions |
 |
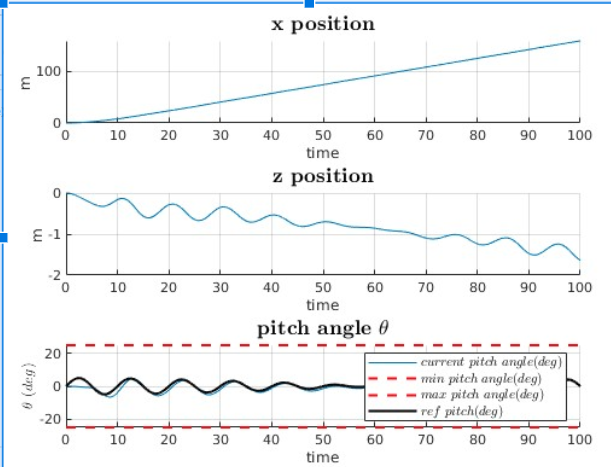
| 3DOF states for the above control inputs |
3DOF velocities following boundary conditions |
 |
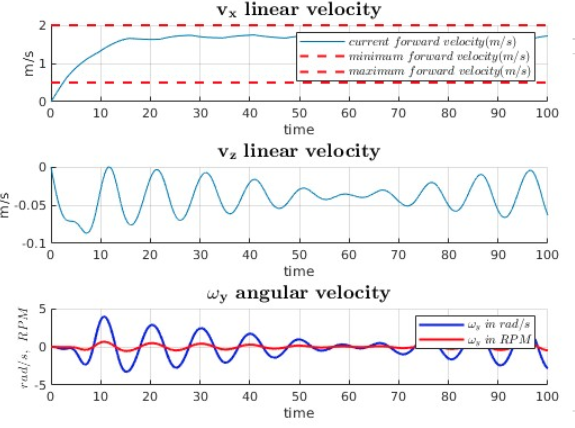 |
Challenges
- The complete model of the Iver model is a complex model to study and analyze.
- Achieving parameters convergence through gain tuning for 32 dynamic parameters is a very challenging problem.